网上的教程都说,安装好了STM32CubeIDE直接创建工程就可以了,然而实际测试下来却完全不是这样。
汉化
安装完毕后,首先要把界面显示语言更改为中文。因为这个ide是基于eclipse的,因此导入eclipse的汉化包就行。
Help -> Install New Software... 打开安装窗口
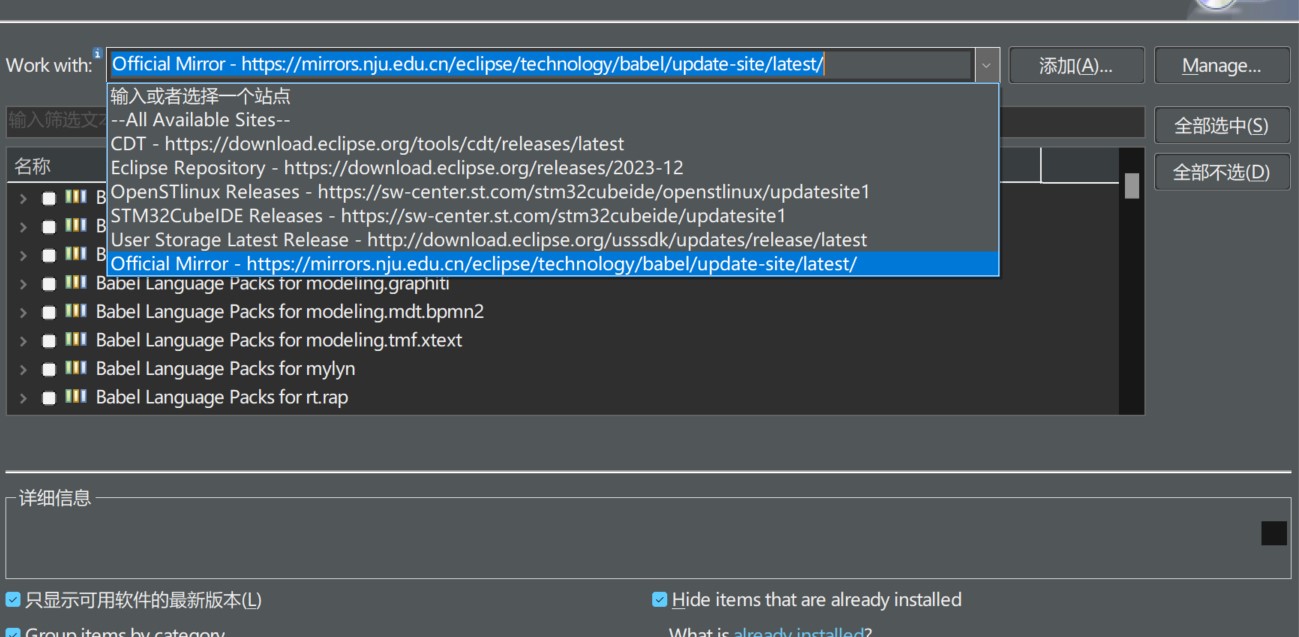
在下拉选单上选择官方的软件源,选中中文包(Babel Language Pack for eclipse in Chinese),打勾,点击下一步,
窗口会显示准备安装的所有包,然后点击完成即可。
由于软件源在国外,所以可能会出现下载缓慢、失败的情况。只需要在Work With框输入国内镜像源地址,点击Add...即可。
如南京大学镜像源地址:https://mirrors.nju.edu.cn/eclipse/technology/babel/update-site/latest/
字符、图标大小调整
默认情况下,IDE的图标很小,编辑器里面的字符也非常的小。图标小的问题要通过 主程序右键 -> 属性 -> 兼容性
-> 更改高DPI设置… -> 勾选替代高DPI缩放行为,并改为系统(增强)
字符大小和样式的调整在窗口 -> 首选项 -> 常规 -> 外观 -> 颜色和字体 中调整。
后来还发现C代码中的注释是灰色的,在黑暗模式下几乎看不清,因此改为了绿色。修改选项在
首选项 -> C/C++ -> 编辑器(Editor) -> 语法高亮颜色(Syntax Coloring)中
安装固件包
旧版本似乎是可以在创建项目的时候自动下载相应固件包的,但是创建的时候却显示需要登录。不想登录的话,可以在github上下载固件包自行安装。
如STM32F1系列的固件包地址是:https://github.com/STMicroelectronics/STM32CubeF1
根据对应的tag下载合适的版本,并解压到对应文件夹,一般是 %homepath%/Stm32Cube/Repository/
在帮助 -> Manager Embedded Software Packages 里面可以检查安装成功与否
然后再重新创建项目,就能正常生成初始代码了。